- Details
- Written by Alexandros Giagkos
- Category: Projects
- Hits: 1303
2016
2016. Developing Object Understanding through Schema Generalisation. ICDL-EpiRob 2016, 6th Joint IEEE International Conference on Developmental Learning and Epigenetic Robotics, Paris, France, 19/09/2016 - 22/09/2016.
2016. Generalising Predictable Object Movements Through Experience Using Schemas. In (eds) From Animals to Animats 14: 14th International Conference on Simulation of Adaptive Behaviour, SAB 2016, Aberystwyth, UK, August 23-26, 2016, Proceedings. Lecture Notes in Computer Science, vol. 9825 14th International Conference on Simulation of Adaptive Behaviour, Aberystwyth, United Kingdom of Great Britain and Northern Ireland, 23/08/2016 - 26/08/2016. Springer Nature pp. 329-339. 10.1007/978-3-319-43488-9_29
2016. (In press) Perception of Localised Features during Robotic Sensorimotor Development. IEEE Transactions on Cognitive and Developmental Systems [Data set: ICDL2016-Dataset]
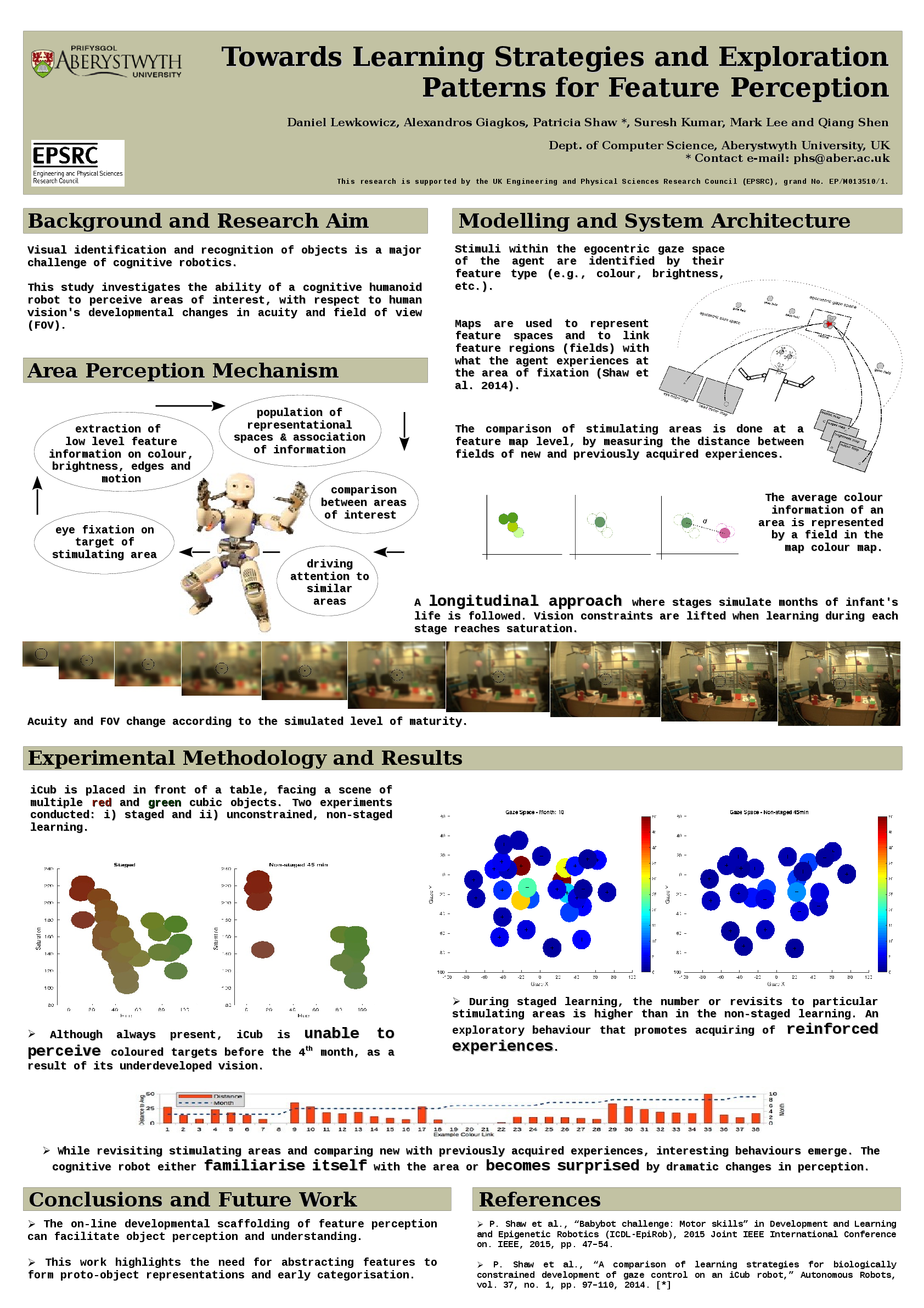
2016. Towards Learning Strategies and Exploration Patterns for Feature Perception. ICDL-EpiRob 2016, 6th Joint IEEE International Conference on Developmental Learning and Epigenetic Robotics, Paris, France, 19/09/2016 - 22/09/2016. [Data set: IEEE TCDS Dataset]
2015
2015. Babybot Challenge: Motor Skills. 5th International Conference on Development and Learning and on Epigenetic Robotics. IEEE ICDL - EPIROB 2015, 5th Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics, United States of America, 13/08/2015 - 16/08/2015. IEEE Press, Providence, RI USA pp. 47-54.
2015. Representations of body schemas for infant robot development. 5th International Conference on Development and Learning and on Epigenetic Robotics. IEEE ICDL - EPIROB 2015, 5th Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics, United States of America, 13/08/2015 - 16/08/2015. IEEE Press, Providence, RI USA pp. 123-128.
2014
2014. A comparison of learning strategies for biologically constrained development of gaze control on an iCub robot. Autonomous Robots 37 (1) pp. 97-110. 10.1007/s10514-013-9378-4 Cadair
2014. A psychology based approach for longitudinal development in cognitive robotics. Frontiers in Neurorobotics 8 (1) pp. 1-19. 10.3389/fnbot.2014.00001 Cadair
2014. From Saccades to Grasping: A Model of Coordinated Reaching Through Simulated Development on a Humanoid Robot. IEEE Transactions on Autonomous Mental Development 6 (2) pp. 93-109. 10.1109/TAMD.2014.2301934Cadair
- Details
- Written by Alexandros Giagkos
- Category: Projects
- Hits: 1168
Distinguished poster award at the IEEE ICDL-EpiRob 2016
Our poster titled "Towards Learning Strategies and Exploration Patterns for Feature Perception" received a distinguished poster award!
 |
 |
The IEEE ICDL-EpiRob 2015 “Babybot challenge”
iCub was used to reproduce the longitudinal study of early reaching in infants between the ages of 1 and 19 weeks, as part of the Babybot challenge at the IEEE International Conference on Development and Learning and on Epigenetic Robotics 2015. The study of the challenge was based on the work Claus von Hofsten presented in 1984, a major finding of which was that the number of successful reaches in babies declined at week 7 and increased again just after, forming a U-shape activity curve.
By utilising the MoDeL's architecture and system and by carefully designing experiments based on the findings and constraints reported in the infant development literature, the iCub robot was able to experience an artificial staged development similar to the infants in the initial study.
The presented study was awarded the second place in the challenge as iCub was shown to achieve similar results in terms of successful reaches and allowed conclusions related to the importance of mapping early sensory-motor experience and repetitive interactions during infancy to be drawn.
The EPSRC Photography Competition 2015:
Following the success in 2015, Sandy Spence and research staff of the project MoDeL won the 1st prize in the People Category of the Engineering and Physical Sciences Research Council (EPSRC) photography competition for a second, consecutive year!
Little Caiya features in 'iCub and the tutor', sharing her toys with the robot while playing.
The image reflects MoDeL's research work, investigating mechanisms that allow the iCub to autonomously learn properties of its immediate physical environment, based on infant development and learning though playing.
For more information, please visit
https://www.aber.ac.uk/en/cs/latest-news/news-article/title-182089-en.html
The EPSRC Photography Competition 2014:
Starting from data based on behaviour in the womb, the iCub follows the early stages of infant development to be able to learn the coordination between sensors and motors, building up the levels of skills and understanding. This project is exploring the growth of human behaviour in order to produce methods for self-motivated learning robots.
The Greatest Discovery, by Sandy Spence, featuring Ayesha Jones and iCub humanoid robot won the 1st prize in the People Category of the Engineering and Physical Sciences Research Council (EPSRC) photography competition.
